Immer mehr Menschen zieht es in die großen Städte dieser Welt. Daher haben all diese Städte mit der gleichen Herausforderung zu kämpfen: nicht ausreichender Parkplatz und sehr dichter Verkehr, insbesondere während der Stoßzeiten. Dieser Umstand wird immer problematischer, da viele Fahrer alleine in großen Fahrzeugen unterwegs sind. Es werden daher kleine, komfortable und sichere Autos benötigt.
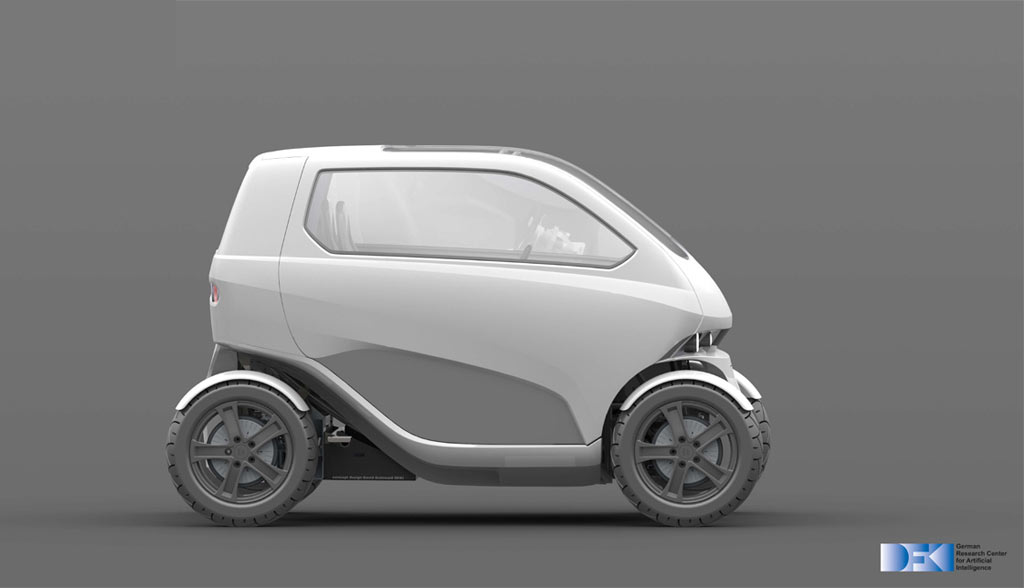
Das Elektroauto EO smart connecting car 2 ist für das Robotics Innovation Center (RIC) am Deutschen Institut für Künstliche Intelligenz als Ergebnis konsequenter und andauernder Forschung, Entwicklung und Optimierung das Konzept, das Städte wieder lebenswerter und den Individualverkehr entspannter machen soll. Vier Radnabenmotoren mit insgesamt 16 kW ermöglichen eine für Städte alltagstaugliche Höchstgeschwindigkeit von 65 km/h.

Wie sein Vorgänger ist das Auto in der Lage normal zu fahren, diagonal zu fahren, auf der Stelle zu wenden, seitwärts zu fahren, sich zu falten, um seine Größe von 2,5 m auf 1,5 m zu verkleinern und gleichzeitig eine komfortable Sitzposition zu bieten.

Große Fenster bieten einen guten Überblick der Fahrzeugumgebung, ein intuitives Benutzerinterface bietet eine einfache Bedienung der Fahrmodi des robotischen Autos. Zusätzlich bieten der Bord-Computer und das Auto-Navigationssystem umfangreiche Fahrerassistenzsysteme bis hin zur Vollautonomie an. Autonomes Parken wird auch in sehr engen und vollgeparkten Straßen möglich sein. Später soll ein Autopilot den Fahrer ohne dessen Zutun zu seinem gewünschten Ziel bewegen und so das fahrerlose Auto realisieren.

Entwicklung einer möglichen Zukunft der Mobilität
Ein Team aus neun Wissenschaftlern, einem Designer sowie mehreren Studenten entwickelten dieses robotische Auto zwischen Oktober 2011 und Juli 2014. Um die Machbarkeit der technischen Anforderungen zu beweisen, wurden eine Integrationsstudie sowie eine detaillierte Physiksimulation entwickelt. Beides verwendete bereits die finalen Achsmodule und einen Großteil der finalen Elektronik, wurde aber durch eine „Rapid Control Prototyping“-Anlage gesteuert.

Nachdem alle Experimente abgeschlossen waren, wurde ein Chassis konstruiert und gebaut. Gleichzeitig wurde die Karosserie designt und konstruiert, sowie die Software für speziell entwickelte Fahrzeugsteuergeräte entwickelt.
Ein problematischer Aspekt der meisten Elektroautos ist das Ladekabel. Um diesen Umstand anzugreifen, wurde eine vielseitige und faltbare Dockingschnittstelle entwickelt, welche unter der Karosserie vorne und hinten im Auto Platz findet. Diese erlaubt das automatische Docken an Ladesäulen, aber auch das Ankoppeln von Zusatzmodulen wie Range-Extender, Passagier-Module oder Transport-Module.
